Lab Objective
In this lab, we used Bluetooth to communicate wirelessly with the Artemis board via Python commands. This is the framework we will be using for all communication in future labs.
Pre-lab Setup
Python and pip were already installed on my lab computer. I installed venv using
the command python3 -m pip install --user virtualenv, created a folder for the
project, and ran python3 -m venv FastRobots_ble to make a virtual environment.
After making sure everything needed was installed and starting the virtual
environment with .\FastRobots_ble\Scripts\activate, I started the Jupyter
server with jupyter lab.
On the Arduino side, I installed ArduinoBLE with the library manager, and burned the given ble_arduino.ino sketch onto my board. The board printed its MAC address in the serial monitor:
Codebase
The ble_arduino folder contains the C header files and .ino files which are uploaded to the board. These tell the board to broadcast itself over Bluetooth, receive messages, and send responses.
The ble_python folder contains the Jupyter notebook and Python files which are run from a computer, and a .yaml config file. These tell the computer to connect to the board over Bluetooth, send messages, and receive responses.
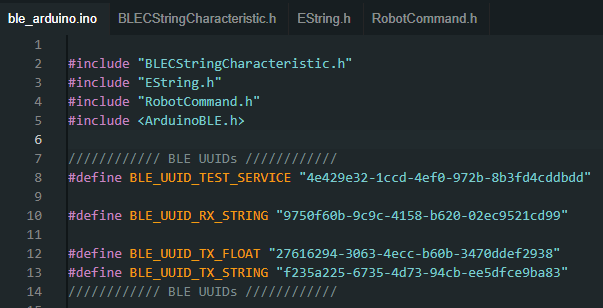
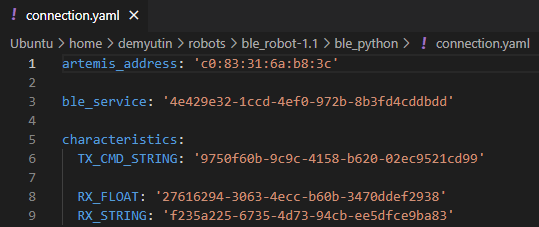
To set up the connection, some parts of the code have to have parity. On the Arduino side, ble_arduino.ino specifies four BLE UUIDs which define the board and different data types, and on the Python side, connections.yaml has the exact same UUIDs:
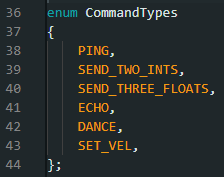
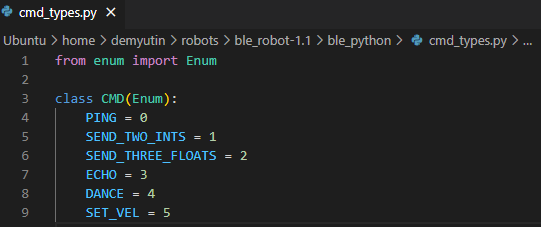
Similarly, ble_arduino.ino has a list of robot commands, and cmd_types.py has the same list in the same order:
This parity is critical to ensure correct communication, so that both the computer and Artemis are “speaking the same language”.
Configurations
As shown in the above images, I modified connections.yaml and ble_arduino.ino to include the Artemis’s MAC address (c0:83:31:6a:b8:3c) and to use a randomly generated BLEService UUID (4e429e32-1ccd-4ef0-972b-8b3fd4cddbdd).
Since I was running on Windows, I changed line 53 in base_ble.py to if True:,
but I later changed this to if False:. This change technically could make my
computer connect to someone else’s Artemis board, but it was necessary to make
the Bluetooth connection stable, and was suggested by a TA.
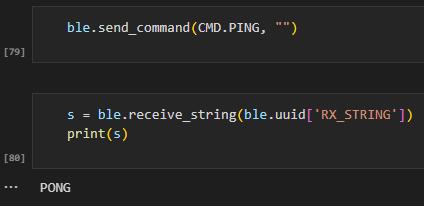
Demo
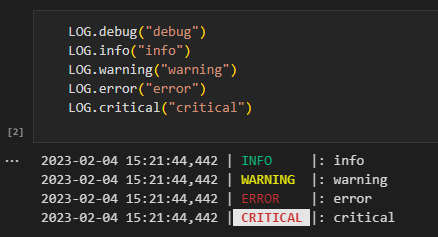
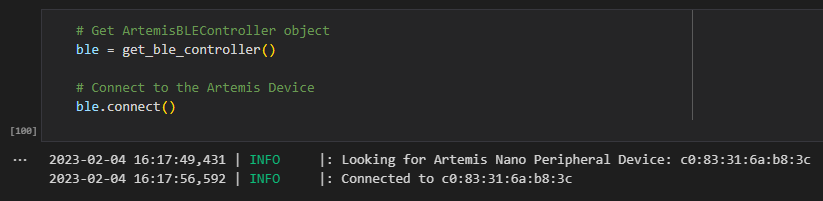
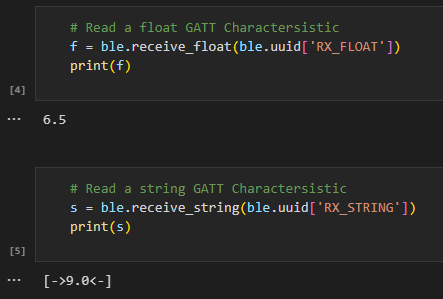
I was able to run all cells in demo.ipynb. These cells generated outputs:

The Artemis printed appropriate outputs to the serial monitor:

Task 1: ECHO
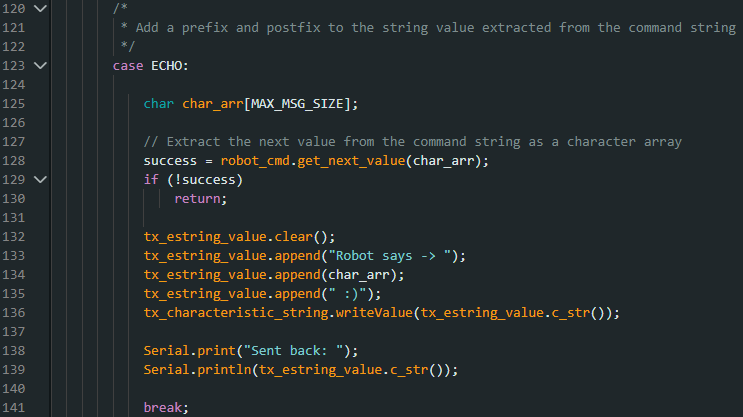
Inside of the handle_command() function in ble_arduino.ino, in the case ECHO:
case in the switch statement, I added the following:
In the Jupyter notebook, I added the following in new cells:
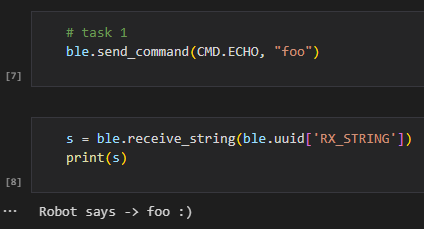
I ran the code and got the above output, confirming that the Artemis received a message over Bluetooth and was able to send it back with changes. To make sure the response was from my board, the Artemis printed the following to the serial monitor:

Task 2: GET_TIME_MILLIS
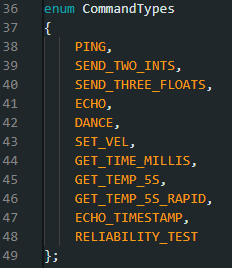
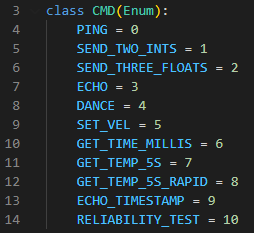
I added GET_TIME_MILLIS as a command in ble_arduino.ino’s CommandType enum,
and also in cmd_types.py. This is a screenshot of both files with all the
commands I ended up adding:
To implement and test the command, I added the following in handle_command()
and the Jupyter notebook:

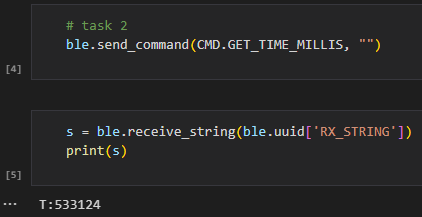
This correctly outputs the time in milliseconds since the board was last reset, prepended with “T:”.
Task 3: Notification Handler
I added the following to the Jupyter notebook:
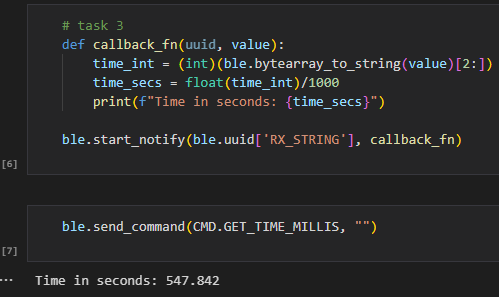
Using a notification handler allows us to process a response as soon as we
receive it, instead of having to call ble.receive_string() and possibly
getting an older response than we were expecting. The above code also prints the
time in seconds instead of milliseconds, although the board still sends the same
message as it did before.
Task 4: GET_TEMP_5S
I added the following:
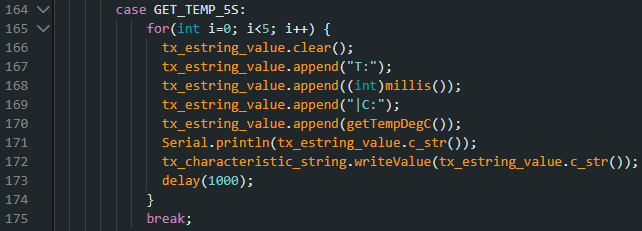
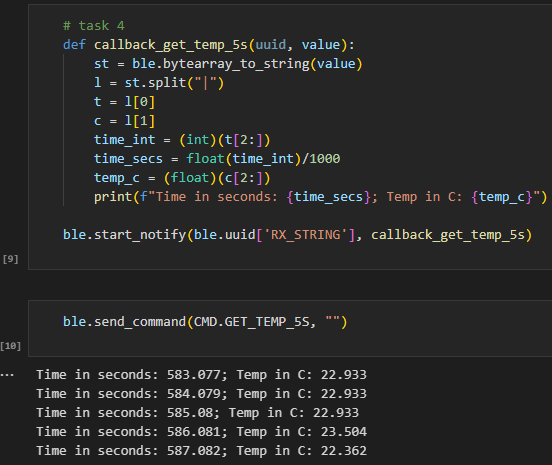
This reads the board’s temperature (in Celcius) once a second, for 5 seconds, and sends the result to the computer with timestamps. The Artemis receives 1 message, and sends back 5 messages. I decided to do this instead of combining all the readings into one message because the message size limit of 150 bytes means I would need to use this method for the next task anyways.
I had to restart the Jupyter notebook to run this cell properly, since the previous task created a notification handler which remained in effect for this task. Doing this repeatedly got annoying, since I had to reconnect to the Artemis every time I changed the code, so I added the following cell, which I ran whenever I needed to change a callback function:

I later find a better fix for this issue (see “Effective Data Rate”.)
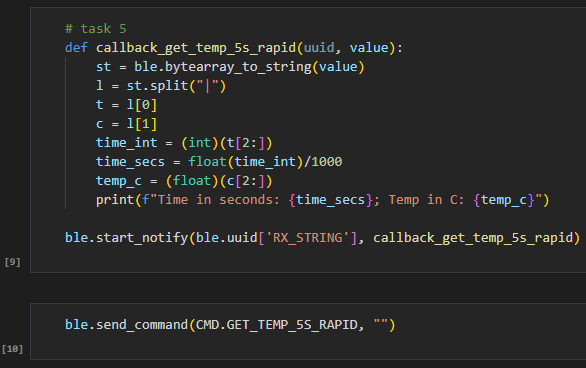
Task 5: GET_TEMP_5S_RAPID
I added the following:
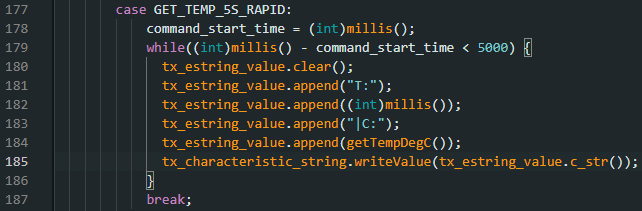
I also declared int command_start_time; at the start of handle_command().
This code continuously takes temperature readings as fast as possible for 5
seconds. Running this produced 160 temperature readings:
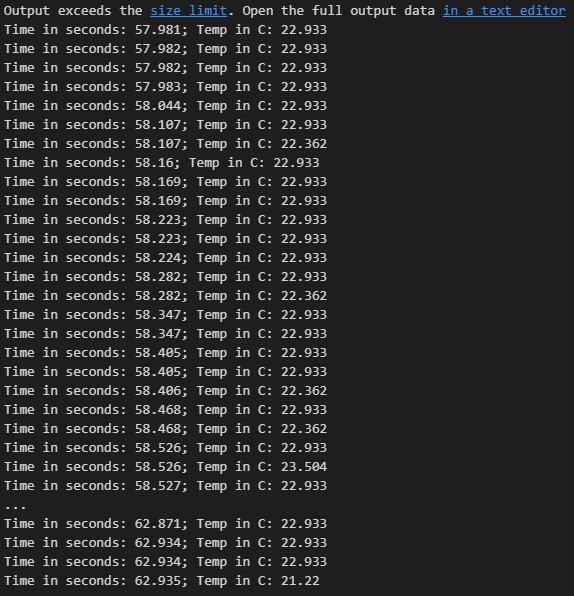
The temperature stayed mostly constant over the 5 seconds, but it is interesting that the samples weren’t spaced uniformly in time. For example, the first 4 samples are all taken within 3 milliseconds, but the 4th and 5th samples are taken 61 milliseconds apart.
This might be because one of the functions being called in the loop occasionally takes a while to execute, or it could be caused by lag in the Bluetooth connection.
Limitations
To reduce Bluetooth communication overhead and lag, we want to package data into larger chunks before sending it to the computer. The Artemis has 364 KB of memory we can use for local variables, as we see whenever we upload a sketch:

If each value we want to store is 16 bits (2 bytes), then we can store about 182,000 values. If we sample data at 150 Hz, then we can store about 20 minutes worth of data on the board. This means that as long as we send data to the computer at least once every 20 minutes, we won’t run out of space on the board.
It seems like we have a lot of space, but we could run into issues if we were collecting more data. For example, if were sampling data at a higher frequency, or the program had a higher memory overhead, or our values were more than 2 bytes each, or we were storing data from multiple sources.
Effective Data Rate and Overhead
To test the effective data rate of Bluetooth, I added the ECHO_TIMESTAMP command, which sends back exactly what the Artemis received and does nothing else:
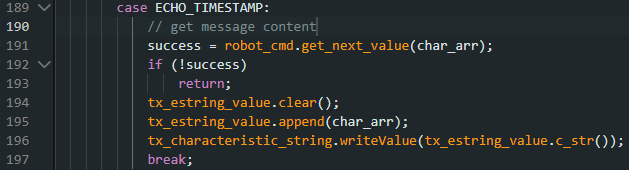
This is separate from the regular ECHO command because I wanted to minimize overhead, so I could be measuring only the time spent on Bluetooth communication and not string building operations.
In Jupyter, I wrote code which calls this command and sends the Artemis a message which is either 1, 5, 25, or 120 bytes long, and tracks how long it takes to respond:
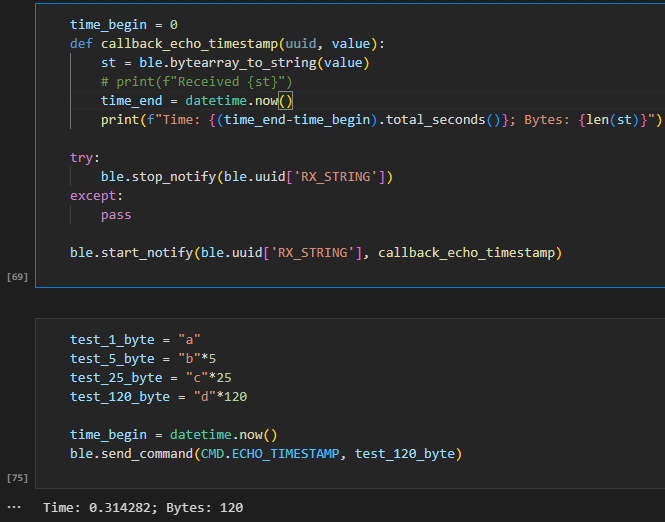
I use ble.stop_notify wrapped in a try-except block so that I don’t have to
worry about older versions of the notification handler persisting in the
Jupyter kernel.
To test this rigorously, I ran 30 trials for each message size:
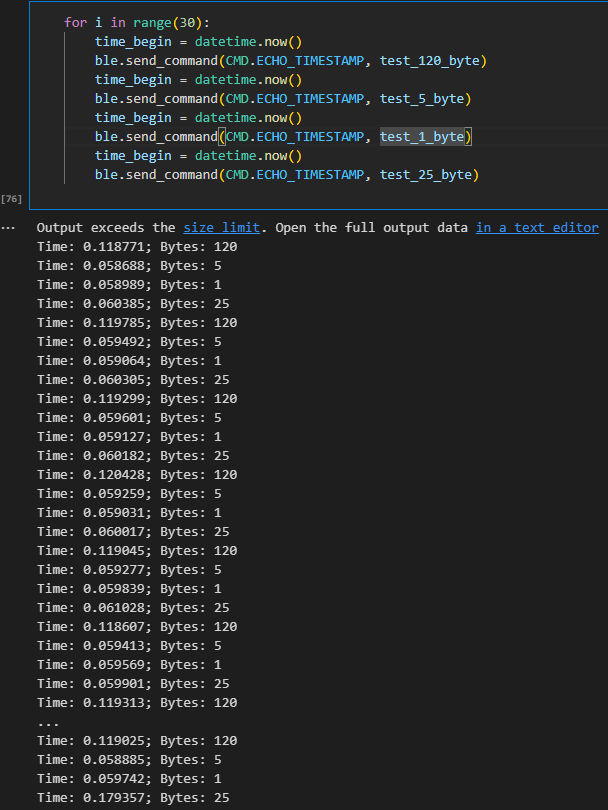
I then copied this into Excel to produce a plot of response times for each message size, and calculate median times:
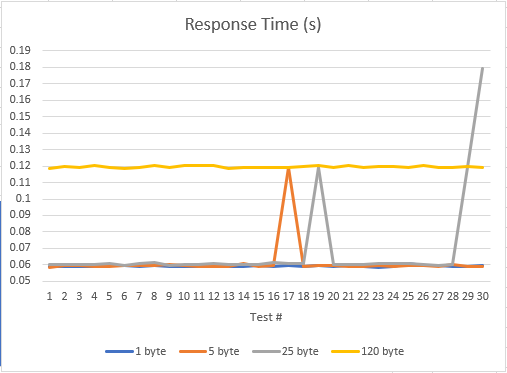
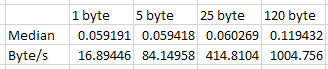
The median response times for 1-byte messages, 5-byte messages, and 25-byte messages were nearly identical at 59-60 ms. 120-byte messages took twice as long to send and receive, with a median time of 119 ms.
The effective data rate in bytes/second was higher for larger message sizes. 5-byte messages could be sent at 84 bytes/second, whereas 120-byte messages could be sent at 1004 bytes/second. This confirms that sending data in larger chunks is good for reducing Bluetooth overhead.
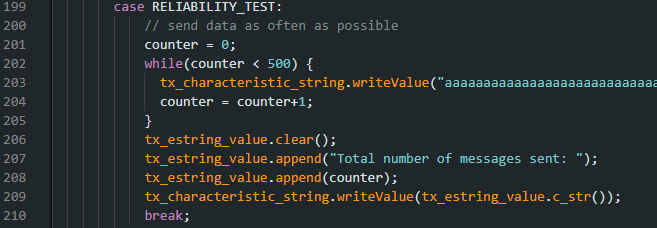
Reliability
To test whether the Bluetooth connection could lose data, I added the RELIABILITY_TEST command, which sends 500 120-byte packets from the board to the computer:
The computer sends the command and receives the messages, counting to make sure that all 500 messages are received with exactly the right data:
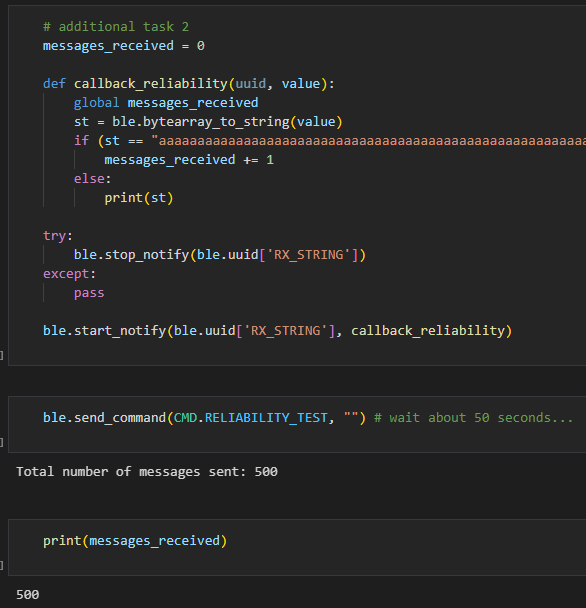
The connection was perfectly reliable, and all the data was received.