Lab Objective
In this lab we will connect our Artemis to the toy car and control it with a pre-programmed sequence of moves.
Prelab
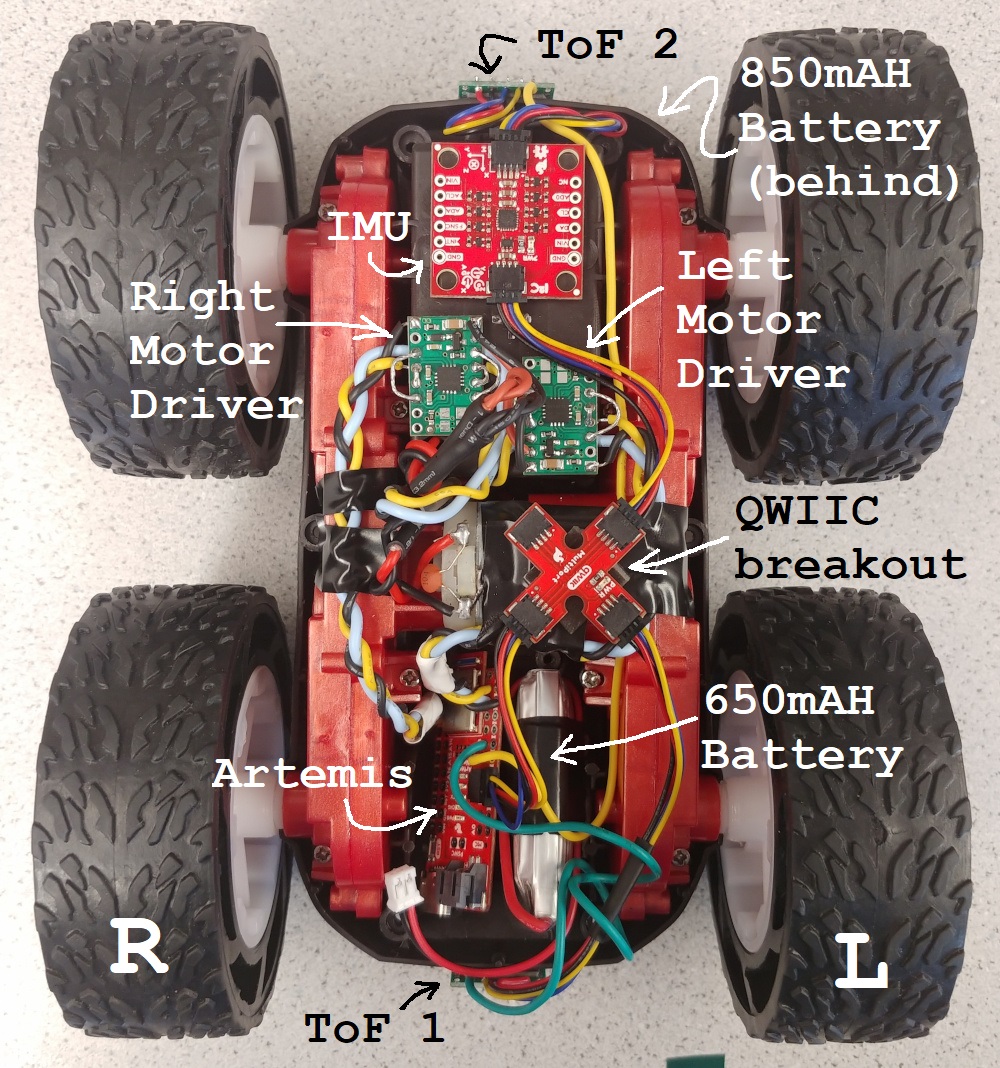
The plan for attaching the Artemis to the motor drivers:
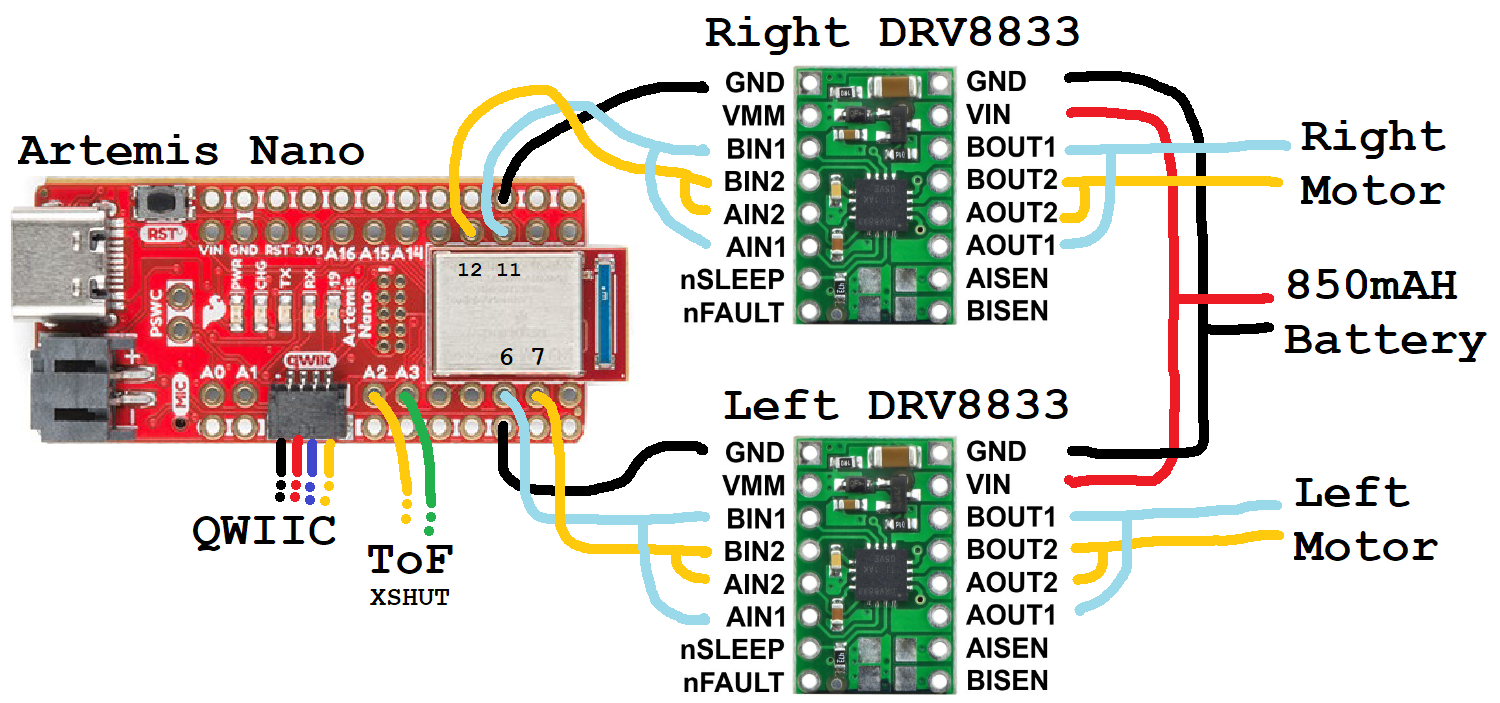
I chose pins 6, 7, 11, and 12 because they can generate PWM signals, and they’re split evenly between the left and right sides of the Artemis.
I’ll be powering the Artemis and motors from separate batteries to give the motors more power, and to reduce power supply noise to the Artemis.
Testing the Drivers
I soldered both drivers to the Artemis, braiding the wires to reduce electromagnetic interference. For testing, I hooked up one driver to an oscilloscope and power supply, as shown:
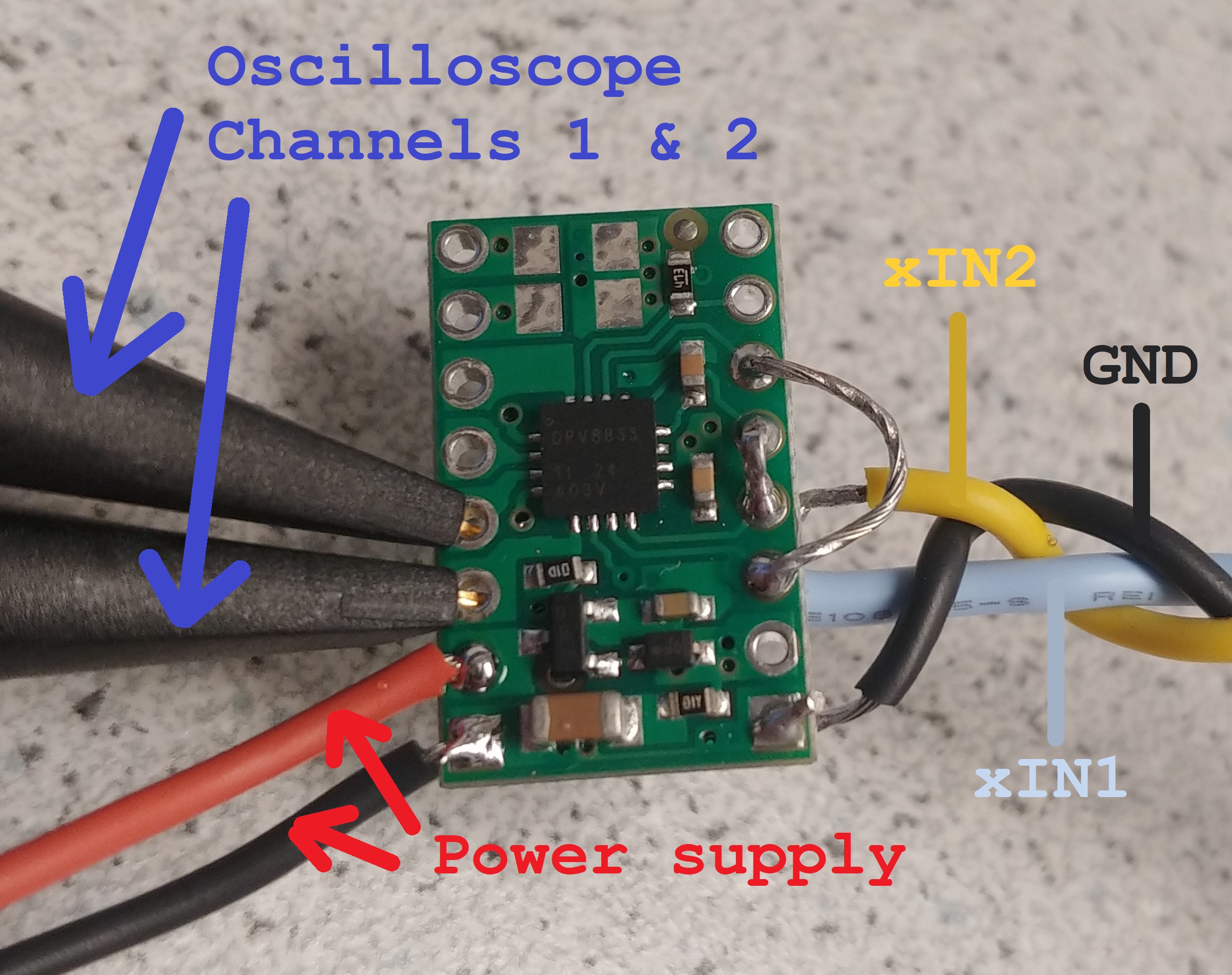
I set the power supply at 3.7 volts and 5 amps, since this mimics what the battery can supply.
To test PWM power regulation I ran this code:
void setup(){
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
analogWrite(6,0);
analogWrite(7,100); // lower power
// analogWrite(7,200); // higher power
}
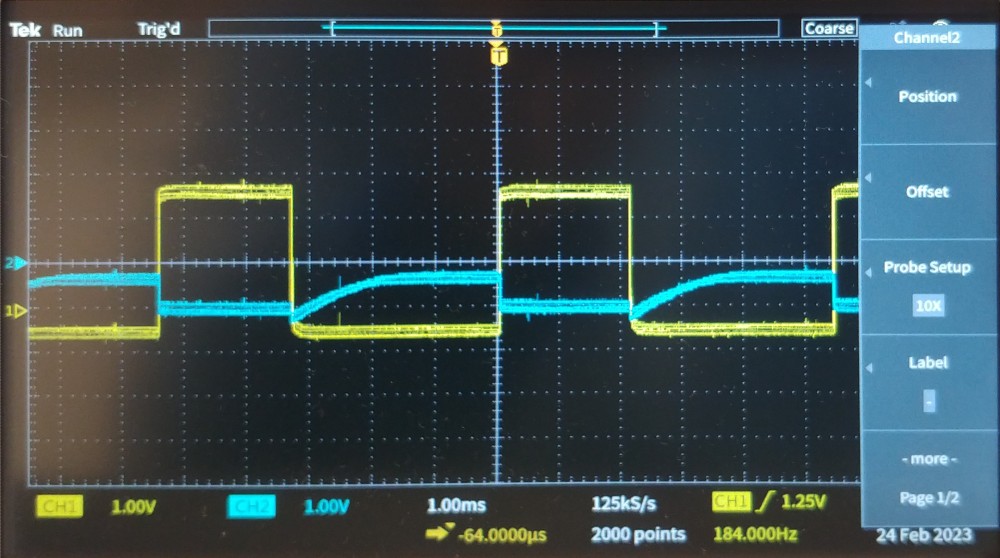
Oscilloscope with analogWrite(7,100):
Oscilloscope with analogWrite(7,200):
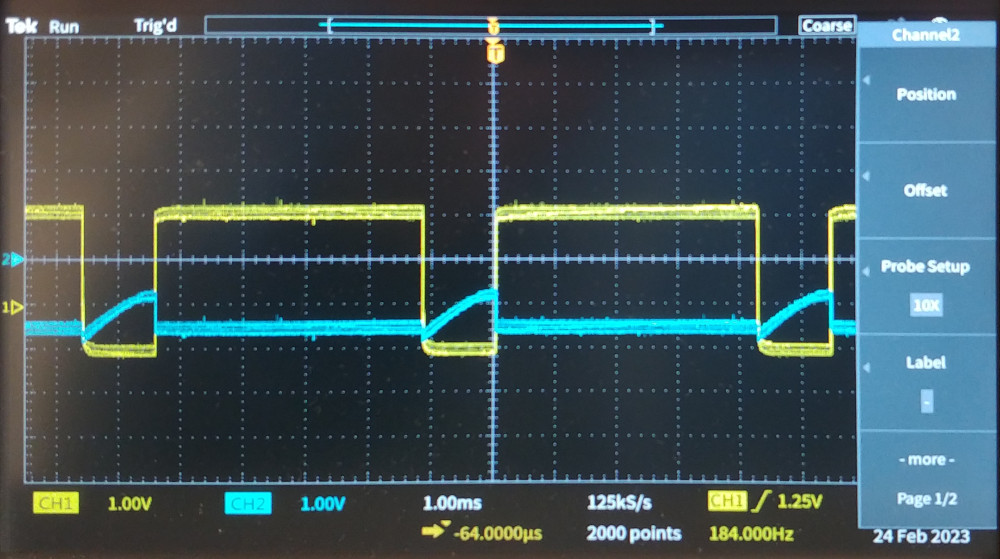
As expected, writing a higher value to pin 7 created an output wave with a higher duty cycle. This confirmed that PWM control was working properly.
Connecting the Motors
I disassembled the car, connected the driver output to one of the motors, and ran the code above with a PWM value of 100. I did this for both motors.
After confirming both motors worked, I moved all components into the chassis and connected the motors and Artemis to their respective batteries.
Remote Control
Code
To remotely control the robot and make testing easier, I implemented more
Bluetooth commands to wrap the analogWrite commands.
Python sends arguments in a Bluetooth command string:
def moveStraight(value, duration):
right = value
left = round(value*0.9)
ble.send_command(CMD.POWER_WHEEL, f"{right}|{left}|{duration}")
moveStraight(255, 1000)
Arduino extracts the arguments from the string and calls other functions…
powerAllWheels(valRight, valLeft);
delay(msTime);
stopAllWheels();
… which I implemented in a separate header file:
void powerAllWheels(int rightVal, int leftVal) {
powerWheel(RIGHT, rightVal, FAST);
powerWheel(LEFT, leftVal, FAST);
}
void stopAllWheels() {
powerWheel(RIGHT, 0, SLOW);
powerWheel(LEFT, 0, SLOW);
}
void powerWheel(WheelSide side, int value, DecayMode decay) {
int frwdPin = side == RIGHT ? 11 : 7;
int bkwdPin = side == RIGHT ? 12 : 6;
int frwdVal = decay == FAST ? max(0, value) : 255-max(-value,0);
int bkwdVal = decay == FAST ? max(-value,0) : 255-max(0, value);
analogWrite(frwdPin, frwdVal);
analogWrite(bkwdPin, bkwdVal);
}
powerWheel is modeled after the specification tables in the
driver datasheet.
Lower Limit
I found that a lower limit on the PWM value I can send to the wheels is around 50, and anything below this doesn’t consistently move the robot forward and on-axis.
Calibration
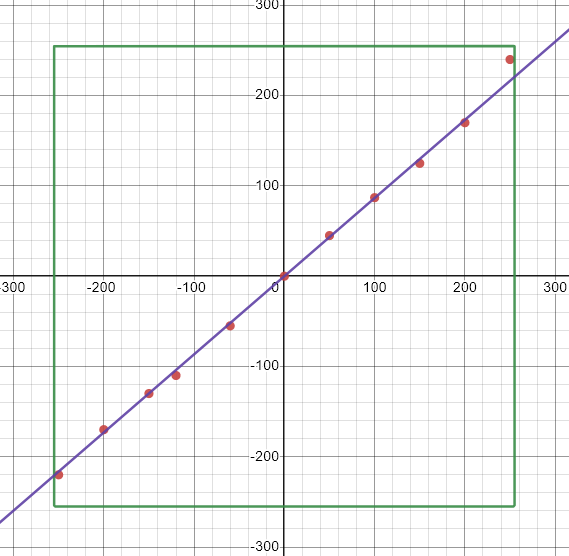
To move the robot straight I had to add a calibration factor, scaling the power to the left motor down by 10% (multiply by 0.9). I found this value by finding pairs of PWM values for the left and right motors which moved the robot straight, and doing a linear regression.
Here is the robot successfully traveling in a straight line for 6 feet:
moveStraight(100, 1500)
Open Loop Untethered Control
I implemented turns by changing the Bluetooth command slightly:
def rotateInPlace(value, duration):
right = value
left = -1*round(value*0.9) # multiply by -1
ble.send_command(CMD.POWER_WHEEL, f"{right}|{left}|{duration}")
To test open-loop untethered control I ran this sequence of commands:
moveStraight(100, 750)
rotateInPlace(200, 500)
moveStraight(100, 750)
rotateInPlace(-200, 500)
moveStraight(100, 750)
This is demonstrated in the video below:
Additional Tasks
analogWrite frequency
The Arduino reference material says that PWM frequency can be between 490 Hz and 1000 Hz, although this page doesn’t list the Artemis Nano. Based on this forum thread, we can increase the PWM frequency up to almost 12 KHz, by choosing a higher CTIMER clock speed and smaller PWM period.
We might not want to do this, however. A higher clock speed will consume more power, and we don’t have a stepper motor so we don’t need fine control over the motor input signal. The default frequency is adequately fast.
Start-up speed vs. slowest speed
To test how slow the robot could move, I ran these commands and varied the slowest speed:
moveStraight(100, 100) # start-up speed
moveStraight(38, 4000) # slowest speed
I found that the minimum speed after starting up corresponded to a PWM value of around 38, and I could reach this speed in about 100 ms.
I also tried running the robot in reverse and found it was much more sluggish, with a minimum effective PWM of 56. I think this is because of variance in my motors.
moveStraight(-100, 250) # start-up speed
moveStraight(-56, 4000) # slowest speed