Lab Objective
In this lab, I use the robot’s improved sensor and control capabilities to perform a stunt, where the robot drives towards a wall, flips over vertically when 0.5m away, and reverses. (Task A)
Procedure
To perform the stunt I added a new robot command STUNT with arguments for
speed, flip distance, and other parameters that I could change on the fly in
Jupyter.
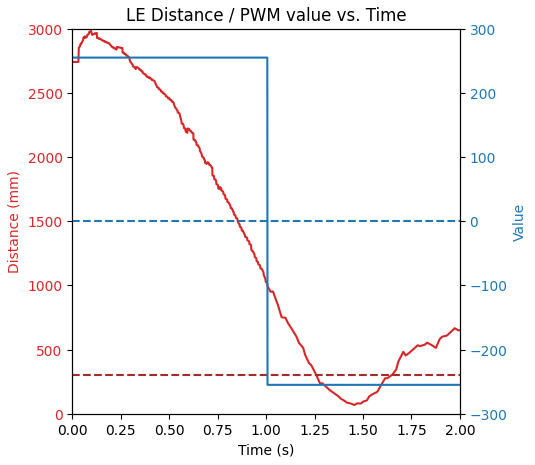
I used the same system of sending debug data as before, so I could see when the robot was deciding to flip, and what the distance readings were. For distance readings I used the extrapolated distance estimate from Lab 7.
I plotted the data from one of my runs below, where you can see that the PWM value controlling the robot changes sign once the sensor reading crosses 1 meter. You can also see the robot doesn’t flip immediately, but decelerates instead.
On the Arduino side, the code was basically this:
// reset / initialize
tof.resetSensor();
bool hasFlipped = false;
long flipTimestamp = -1;
int power = maxPower;
// loop until end
while(timeElapsed < totalTime) {
// time update
currentTime = millis();
timeElapsed = currentTime - startTime;
// distance update
int distance = tof.getDistanceEstimate();
// check if we need to flip
if (!hasFlipped && distance <= flipDistance) {
power = -maxPower; // full reverse power
hasFlipped = true;
flipTimestamp = currentTime;
} else if (currentTime - flipTimestamp >= 1000){
power = 0; // stop after reversing for 1 second, so the robot doesn't run off
timeElapsed = totalTime + 1; // break out of loop after gathering data
}
powerWheels(power);
// data collection
intArr1[numData] = (int)timeElapsed;
intArr2[numData] = distance;
intArr3[numData++] = power;
}
stopAllWheels();
// send data
sendArrays(numData);
Unsuccessful runs
In this run, the robot successfully flipped over before hitting the wall. However, it turned 90 degrees about the vertical axis while flipping, so when it went into “reverse”, it actually went off to the side instead. Immediately after flipping, the back wheels bounced and caused to robot to turn onto its side, losing control completely.
In this video, the bounce after flipping isn’t as extreme, so the robot doesn’t turn onto its side. However it turns more than 90 degrees about the vertical axis while flipping, so when it goes in “reverse” it immediately hits the wall instead.
Attempted solutions
The list of things I tried to make this work includes the following:
- Using a fully charged battery
- Getting a new battery
- Completely stopping the motors in between the full-forward and full-reverse
- Putting extra weight into the battery compartment to shift the robot’s center of mass
- Starting the flip further away from the wall
- Using slow decay mode on motor drivers to increase torque
- Just powering the motors as normal without using a special decay mode
- Decreasing power to the left wheel to keep the robot pointed straight
- Using a different left-right motor calibration factor for forward and reverse movement
- Putting rubber bands on the wheels to try to improve the friction
The next thing I was going to try was to use some kind of PID orientation control to make sure the robot stayed straight while flipping, but I was advised by a TA to just submit this and finish the other labs, since this lab is already very late.